机器人用谐波减速器不简单,这才是真正的机械,非常烧脑
机器人用的谐波减速机,是利用金属材料的弹性变形来实现力的传递,非常不符合常理,这个设计思路如果是国内工程师提出来的,肯定会被领导打死。
谐波机械传动原理是前苏联工程师A.摩察尤唯金于1947年首次提出,而美国的C.WaltonMusser根据空间应用需求于1953年发明了谐波减速机,并于1955年获得美国专利,不管怎么说,这也是美苏合作的结晶,形成了一个标准的机械产品,在机械行业创造了一个奇迹。
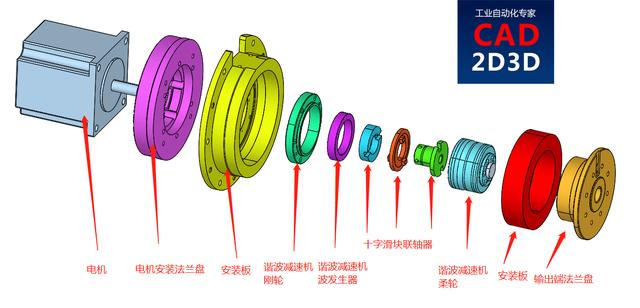
谐波减速机原理不是很复杂,但非常巧妙,谐波减速机由波发生器、柔轮和钢轮组成,利用柔轮比钢轮少2个齿数,当波发生器转1圈之后,柔轮才转1个齿,实现了非常高的传动比。


原理不是很复杂,但制造难度很大,对柔轮材料要求非常高,柔轮是带有外齿圈的柔性薄壁弹性体钢制零件,承受着连续的交替变形,运转时间长了,就会产生疲劳损失,寿命和精度大大降低。
目前,国内也有厂家在生产谐波减速机,我看规格书上标注的寿命是10000h,而行业第一的美国公司,产品寿命是7000h~10000,虽然美国最早发明了谐波减速机,但国内制造商已经超越美国。
减速机已经被攻克,还有什么是我制造不了的,国内的制造业只会越来越强!
2022-03-31
넶浏览量:0